

随着人工智能的快速发展,人机交互正从传统的点按、滑动操作模式迈向更加自然、智能与沉浸式的具身交互(EHMI)新阶段。水凝胶以其类皮肤柔韧性与优异生物相容性等特征在柔性压阻传感领域应用广泛。然而,两个关键问题仍困扰该领域的快速发展,高性能双交联水凝胶的光固化3D打印高精度制造受“一釜两步”制备过程限制,存在初始共价交联密度过高、导电填料吸光抑制聚合等固有缺陷,导致水凝胶传感器在机械柔顺性与传感性能之间难以实现协同提升;高密度传感阵列布设不可避免地引入机械约束与穿戴负荷,损害了佩戴舒适性并限制了生理活动,而通过降低传感阵列密度或简化结构又会因传感维度不足而损失关键信号。
针对上述问题,中国科学院兰州化学物理研究所润滑材料全国重点实验室功能润滑材料课题组与多家单位展开合作研究,将类芬顿反应与光固化3D打印技术相结合,以异丙苯基二茂铁六氟锑酸盐为光引发剂,同步触发自由基与阳离子双重光聚合反应,实现了水凝胶可打印性与功能性的协同优化,成功制备出兼具高机械柔顺性与优异传感性能的石墨烯-铁离子动态配位海藻酸钠-聚丙烯酰胺水凝胶材料(GFSP,图1)。
该水凝胶的拉伸强度和电导率分别为54.19kPa和0.92S/m,灵敏度高达1.582 kPa-1,可检测低至0.01%的微小应变,响应时间与恢复时间仅为14.22ms和21.56ms。同时,受蜘蛛通过蛛网远程感知微弱振动信号以捕获猎物机制的启发,提出了一种低约束穿戴式仿生传感策略,设计并研制出十字形水凝胶压阻传感贴片(LCWHSP,图2)。该十字形仿生结构赋予单一传感贴片“单点多维”感知能力,可精准捕捉人体关节运动经肌腱、筋膜及软组织传导至远端皮肤的多维应变特征,无需高密度、全覆盖布设即可完整采集运动信号。该创新设计突破了传统传感阵列密集部署模式,在保证高精度信号采集前提下,大幅减少了传感器数量与穿戴覆盖密度,解决了现有传感器长期佩戴舒适性不佳的问题。
在此基础上,通过集成信号采集软/硬件、深度学习智能分析模型及实际工况应用模块,搭建了完备的具身人机交互系统。该系统可实现对人体静态手势与动态连续手势的高精度、实时识别,准确率高达98.60%,并能稳定完成游戏界面虚拟人物操控和智能机械臂精准作业等复杂人机交互任务(图2),展现出良好的实用性与稳定性。此外,基于GFSP的高灵敏度与快速响应性,可将其用于摩擦振动感知领域,实现对人体关节微摩擦、弱振动等精细力学信号的感知与实时捕捉。该研究为发展自然、舒适、高效的新一代人机交互界面提供了理论和实验支持。
上述研究成果以“Bionic Hydrogel Sensor Patches for Embodied Human-Machine Interaction: Low-Constraint Wearable Design and Applications”为题发表在Advanced Functional Materials(2026; 0:e76031)上,博士生李义云为论文第一作者,李章朋副研究员和王金清研究员为共同通讯作者。相关成果申请发明专利2件(CN 202511129999.4和CN 202511499136.6),并获软件著作权登记1件(2025SR1896975)。
上述研究工作得到了中国科学院战略性先导科技专项(B类)与国家自然科学基金面上项目的支持。
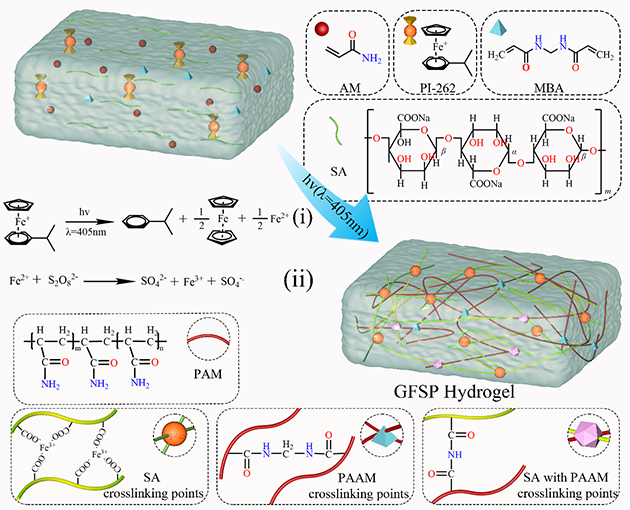
图1.光固化3D打印GFSP水凝胶制备原理
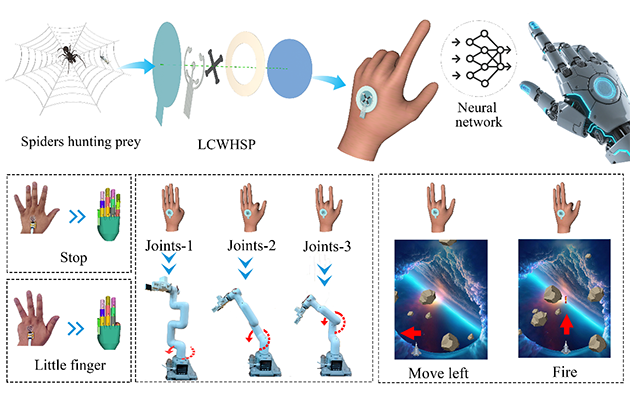
图2.低约束可穿戴传感器贴片(LCWHSP)结构设计与示范应用


